Projektergebnisse
MRK-Simulationswerkzeug (Folien – Download)
Die Entwicklung eines Planungs- und Simulationswerkzeugs für MRK-Applikationen ist wesentlicher Bestandteil vom Forschungsprojekt KoMPI. Im Rahmen der ersten Projektphase wurden die Anforderungen an dieses zu entwickelnde Unterstützungssystem auf Basis von Marktrecherchen sowie verschiedenen Workshops mit den Anwendungspartner und Systemintegratoren erarbeitet. Ein spezifiziertes Lastenheft lieferte anschließend die Grundlage für des Gesamtkonzepts (vgl. Verlinkung in der Überschrift).
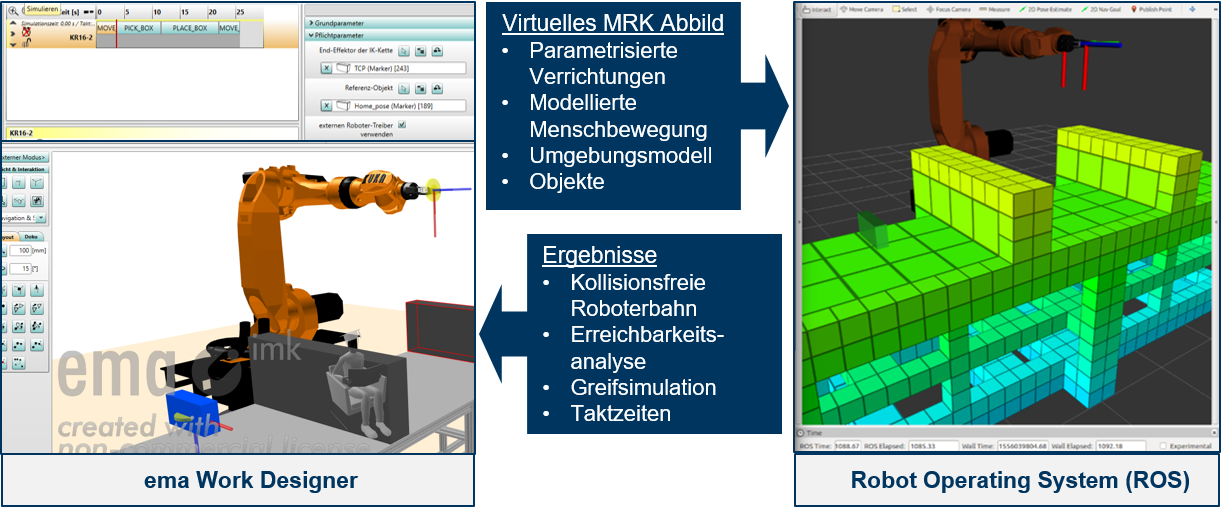
In enger Zusammenarbeit zwischen den Projektpartner imk automotive GmbH und dem Lehrstuhl für Produktionssysteme der Ruhr-Universität Bochum erfolgte in der zweiten Projektphase die Konkretisierung und Umsetzung des o.g. Konzepts. Das Ergbniss ist eine funktionale Integration von Planungs- und Bewertungsfunktionen der Automatisierungstechnik, basierend auf dem Robot Operating System (ROS), in das Planungs- und Humansimulationssystem ema Work Designer. Die konzeptionierte Architektur sowie der Workflow innerhalb des Simulationswerkzeugs sind zudem ausführlich in der Publikation Functional Integration of a Robotics Software Framework into a Human Simulation System dokumentiert.
Quick-Check und Schulungskonzept (ZIP – Download)
Um MRK-Systeme effektiv entwickeln und einsetzen zu können, ist es wichtig, bestehende Montagesysteme bereits in einer frühen Planungsphase auf ihr MRK-Eignungspotential hin zu überprüfen. Ermöglicht wird dies durch den KoMPI-Projekt entwickelten
MRK-Quick-Check, der anhand verschiedener Anwendungsfälle erprobt wurde. Der Quick-Check ist ein Werkzeug zur schnellen, objektiven und belastbaren Bewertung bestehender Arbeitsplätze hinsichtlich MRK-Potentiale durch den Planer. Die Quick-Check-Durchführung ist der erste Schritt
des digitalen Planungsprozesses für kollaborative Montagesysteme.
Identifizierte MRK-Montagearbeitsplätze der Anwendungspartner (Folien – Download)
Im Rahmen des Forschungsprojektes KoMPI wurde bei der Karl Dungs GmbH & Co. KG ein Pilotbereich ausgewählt, in dem die Arbeitsinhalte zwischen Mensch und Roboter aufgeteilt werden. Dadurch, dass der Leichtbauroboter Aufgaben des Mitarbeiters übernimmt, wird dieser entlastet und kann für andere, höherwertigere Tätigkeiten eingesetzt werden. In einer Fließlinie, in welcher Druckwächter montiert werden, übernimmt künftig eine MRK-Applikation die Endmontage. Varianten, die aufgrund der Teilebeschaffenheit, nicht vollständig durch den Leichtbauroboter komplettiert werden können, werden vom Roboter umgesetzt und die fehlenden Montageschritte werden durch die Werkerin übernommen. Die Montagelinie wurde mit dem Hintergrund ausgewählt, dass nach MTM-Zeitaufnahmen die 2. Werkerin nicht vollständig ausgelastet ist und die Wartezeiten mit anderen Tätigkeiten auffüllen muss.
Des Weiteren wurden weitere MRK-Montagearbeitsplätze bei den Anwendungspartnern KOSTAL und Jung mithilfe des entwickelten Quick-Checks identifiziert.
Systemintegration von MRK (Folien Download)
Die Fa. Boll Automation GmbH setze die beschriebene MRK-Applikation mit dem Leichtbauroboter KUKA iiwa inklusive der Entwicklung von Werkzeugkonzept, Werkzeugdesign, Layout-Gestaltung und Sicherheitskonzept bei der Karl Dungs GmbH & Co. KG in der Druckwächter-Fließlinie um.